研究 / Research

転倒挙動モデリング / Development of fall motion model
装着型ロボットは装着者の歩行のアシストを目的としており, アシストのずれや関節可動域の制限によって不安定や転倒を招いては本末転倒です. 特に,つまずきや急減速等の非定常な動作をしたときにそのリスクが高まります. 装着型ロボットを使用しての歩行中にそのような外乱を発生させ,それに対する挙動を計測することで, 人間の転倒回避戦略,能力に対するロボットの影響を評価します.
Although wearable robots aim to improve human gait performance, they perhaps interfere their wearers owing to the mismatch of assist timing, limitation of the range of motion, and so on. In particular, it potentially happens when tripping, sudden deceleration, or other gait instability occur. We evaluate the effect of the wearable robot on the fall avoidance strategy and performance of the wearer by measuring the reaction motion against disturbance of gait.
- 転倒回避動作シミュレータ開発
Development of the fall motion simulator - 転倒動画の3次元動作解析
3D motion analysis of the 2D video of fall motion
装着型デバイスの日常環境適応 / Accommodation of wearable devices on daily living environment
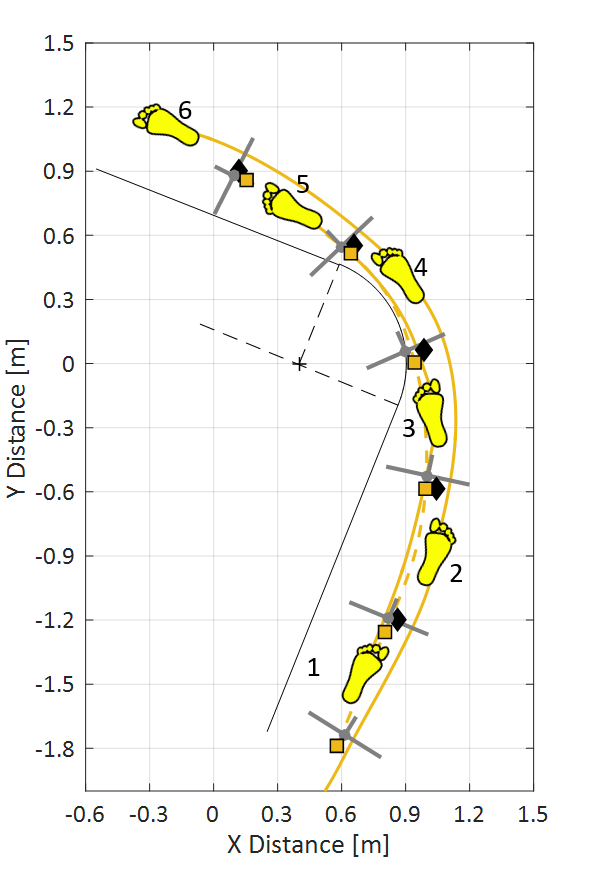
直線歩行路やルームランナー上でのリハビリと異なり, 装着型ロボットが生活環境で使用されるようになると廊下を曲がったり家具をよける動作が必要になります. 一方,自由度の追加はロボットを複雑にするため,機能の絞り込みが必要です. 装着状態での旋回動作のスムーズさ,バランスを評価すると共に,必要十分な関節自由度とアシストを開発します.
Wearable robots have to accommodate to the daily living environment in society, which differ from the environment of rehabilitation fields. Curving is representative motion of such newly required motions. However, it is not acceptable to make the robot too complex or heavy. Thus, we evaluate the performance and safety of curving gait and develop a mechanism which can achieve curving with minimum complexity.
- 生活環境における装着型ロボットの歩行安全性検証
Evaluation of the gait stability of the exoskeleton in daily living conditions
日常歩容評価デバイス / Gait assessment device
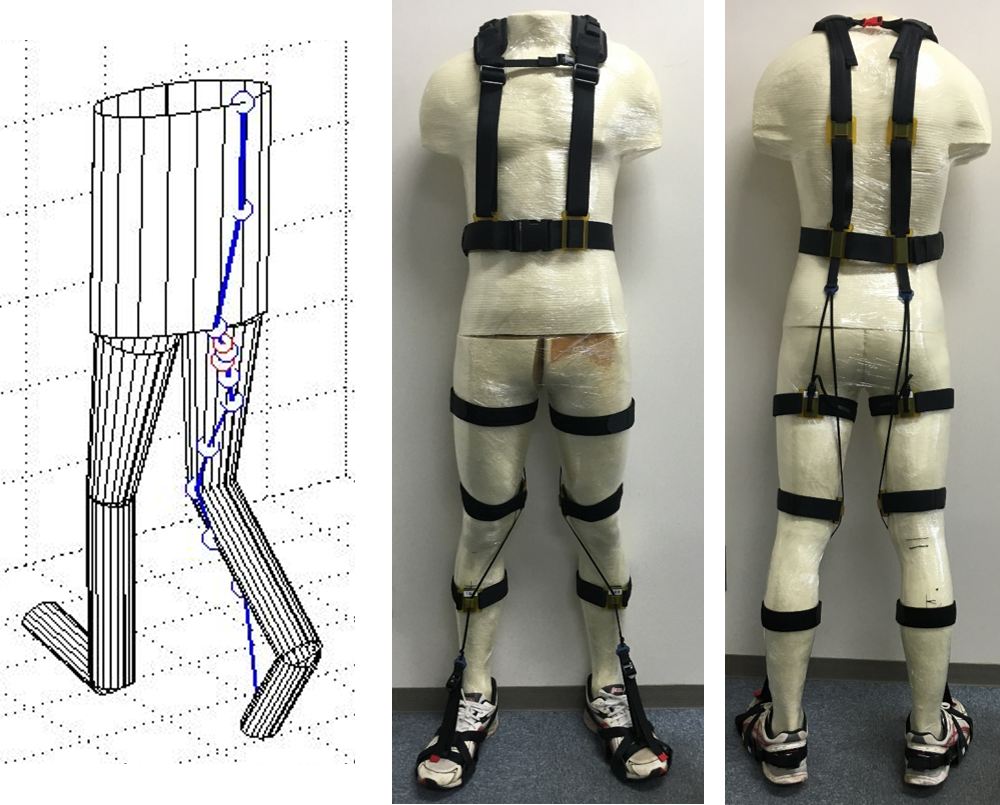
装着者の体幹部の動作を下肢に伝え,アクチュエータなしで歩行をアシストするデバイスを開発しています. 人間は歩行時に足だけでなく腰や上体も動かしているため, ワイヤーでアシスト部位と体幹をつなぐと歩行リズムに合わせてワイヤーが引かれることになります. これを利用して,つなぐ部位やワイヤーの配置を適切に調整することでアシストタイミングおよび強さを最適化しています. さらに,使用感の向上により,軽量,着脱容易,安価で実用的なデバイスを目指しています.
A gait assist suits, which does not equip any actuator, is developed. This device works by connecting assisted part such as foot and source of assist power such as torso using strings. The body motion associated with gait such as twist and sway of body applies tension to strings periodically. By Optimizing the layout of string path on the body surface, the timing and strength of assist can be adjusted.
- 軽量アシストスーツ開発
Development of the fabric gait assist device - 歩行安定性指標構築
Development of the gait stability index