ACTUATED
DIFFERENTIABLE
MANIFOLD
LABORATORY
信州大学 繊維学部 機械・ロボット学科
バイオエンジニアリングコース
作動可微分多様体研究室
Top
Research
Member
Publications
Admissions
Access
Research
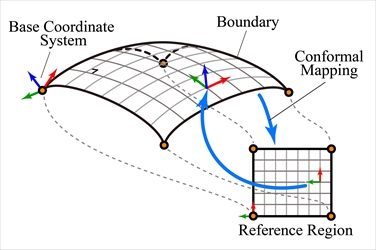
等角写像を用いた曲面形状ロボットの運動学理論
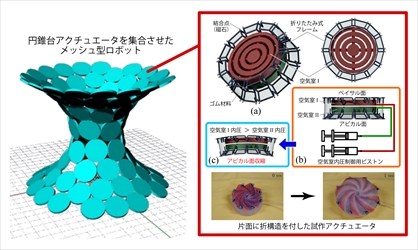
円錐台型アクチュエータを集合させたメッシュ型ロボット
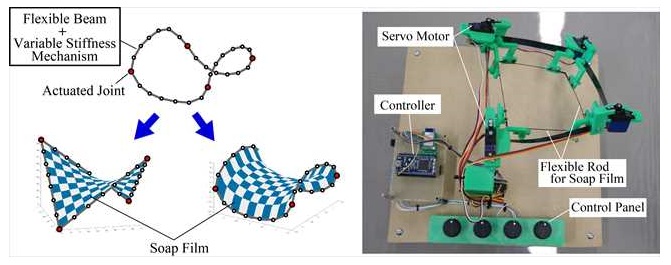
Plateau問題を機構的に解く境界制御型曲面形状ロボット
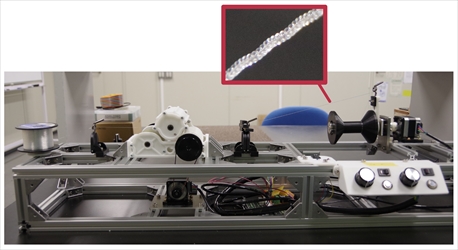
長大なナイロン繊維アクチュエータ作製のための撚糸機
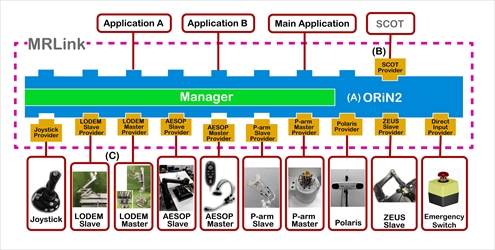
多マスタ・多スレーブ選択結合型ミドルウェア MRLink
曲面形状ロボットを用いた手術支援ロボットのための情報取得システム開発
専用ページ
Copyright © Actuated Differentiable Manifold Laboratory